
blog
•
2026年4月15日
•
85 次阅读
CADC2025
cadc
tech
穿越机
# 🛩️ 中国国际飞行器设计挑战赛(CADC)参赛全记录
## 🏆 赛事简介
**中国国际飞行器设计挑战赛**(China Aeromodelling Design Challenge,简称CADC)是由国家体育总局航空无线电模型运动管理中心、中国航空运动协会、中国大学生体育协会、中国人民解放军国防科技大学联合主办的**国家级航空航天科研类赛事**。
该赛事面向全国高校和高中学生,涵盖**飞行器设计、制造与飞行控制**等全流程环节,是国内最具影响力的航空模型竞赛之一。
---
## 🎯 我的参赛角色
### **项目分工**
我们实验室分为两个项目组:
- **🔧 我负责:微型折叠飞行器(微折)项目组**
- **🆘 另一组:模拟搜救项目组**
### **个人职责**
| 角色 | 具体工作 | 技能要求 |
|------|----------|----------|
| **机械设计** | 整机结构设计、零件建模、装配验证 | SolidWorks、3D打印、材料力学 |
| **飞手** | 飞行测试、赛道训练、正式比赛 | 精准操控、应急处理、心理素质 |
| **电控调试** | 飞控固件配置、PID调参、功能开发 | Betaflight、PWM控制、串口通信 |
| **团队管理** | 项目进度把控、任务分配、技术决策 | 项目管理、团队协作 |
> 💡 **自我发现**:参赛过程中逐渐意识到自己在飞行操控方面具有突出天赋,成为项目组的**核心多面手**。
---
## 📅 参赛时间线
```mermaid
gantt
title CADC 2025 参赛历程
dateFormat YYYY-MM
section 微折项目组
方案调研与学习 :2025-03, 30d
新设计提出与验证 :2025-04, 30d
原型机制作与测试 :2025-05, 90d
CUADC精准打击参赛 :2025-08, 15d
最终优化与训练 :2025-09, 30d
CADC全国总决赛 :2025-10, 7d
section 个人成长
成为项目主力 :crit, 2025-05, 150d
飞行技能突破 :2025-07, 60d
多领域技术融合 :2025-08, 90d
```
### **关键节点**
- **2025年3月**:开学即投入备赛,学习往届设计方案
- **2025年4月**:完成全新飞机设计,3D打印并组装验证
- **2025年8月**:参加CUADC精准打击项目(热身赛)
- **2025年10月**:CADC全国总决赛(无分站赛,直通决赛)
---
## 🏅 获奖成绩
### **微折项目组(我带领)**
| 队伍 | 奖项 | 等级 | 备注 |
|------|------|------|------|
| **队伍A** | 银牌 🥈 | **国家一等奖** | 全国排名前列 |
| **队伍B** | 第6名 | **国家一等奖** | 进入前十强 |
| **团体奖** | 综合优胜 | **国家一等奖** | 项目组整体表现 |
### **模拟搜救项目组**
- 两支队伍均获得 **国家三等奖**
> 🎊 **成就总结**:带领团队斩获**2项国一 + 1项团体国一**
---
## ✈️ 飞行器设计详解
### **整体概览**
<div align="center">
<img src="/uploads/2026/4/1776234139115-945771155.png"
alt="微型折叠飞行器设计图"
width="80%"
style="border-radius: 10px; box-shadow: 0 4px 12px rgba(0,0,0,0.1);">
<br>
<em>图1:我设计的微型折叠飞行器</em>
</div>
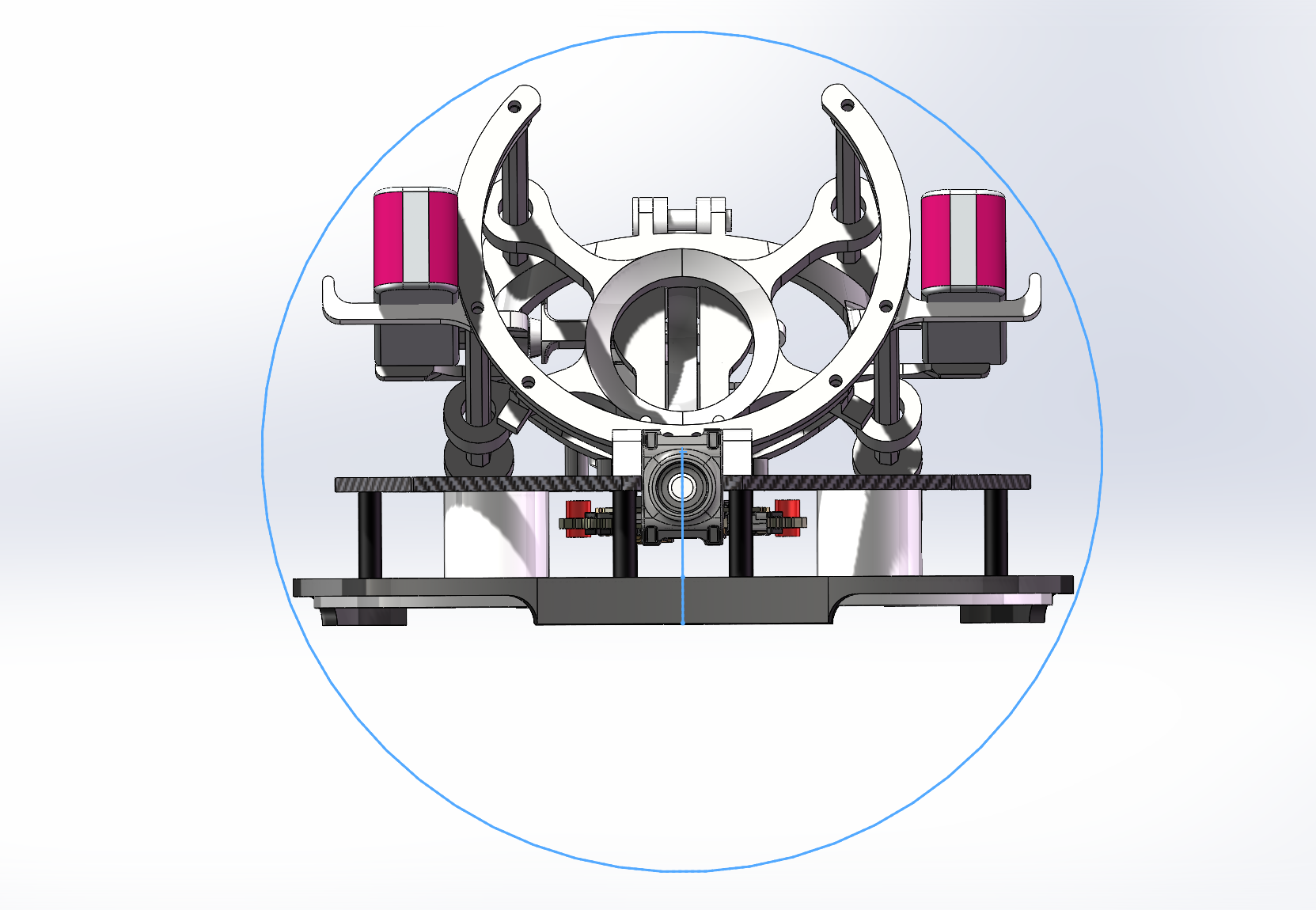
### **技术规格**
```yaml
基础配置:
类型: 四旋翼穿越机
设计: 叠桨布局(紧凑型)
动力: 4S电池系统
供电: 2×2S高压锂电池串联
重量: ≈320g(含比赛用球)
核心部件:
飞控: Flywoo Goku AIO
电机: C145无刷电机
桨叶: 乾丰D63-3三叶桨
悬停油门: 35%(满电状态)
性能评价:
动力水平: 中等(穿越机标准)
紧凑性: 极佳(整机高度<100mm)
可靠性: 高(经过1700+次测试)
```
### 🔧 **创新设计亮点**
#### **1. 发射器系统(核心创新)**
```markdown
设计理念:借鉴枪械激发结构,实现快速可靠发射
技术特点:
├── **储能方式**:4组不锈钢弹簧
├── **释放机构**:插销式锁止结构(原创设计)
├── **建模技术**:SolidWorks曲面建模
└── **材料选择**:PLA、PETG以及铝柱配合
优势对比:
| 指标 | 去年方案 | 我的设计 | 改进 |
|------|----------|----------|------|
| 上膛速度 | 慢(双手操作) | **快(两步完成)** | +200% |
| 整机高度 | 120mm | **<100mm** | -20% |
| 可靠性 | 中等 | **高** | 显著提升 |
| 操作复杂度 | 高 | **低** | 简化60% |
上膛流程优化:
1. **插销右移** → 放入卡槽
2. **推板拉到底** → 自动锁止
✅ 完成!(无需额外固定)
```
#### **2. 图传活动底座问题**
```markdown
问题背景:
初始设计将图传置于碳板下方,导致:
├── 桨叶进风受阻
├── 悬停油门 >40%(动力不足)
└── 散热问题严重
解决方案:
设计可活动图传底座
├── **活动目的**:便于发射器上膛操作
├── **安装位置**:重新规划空间布局
└── **效果**:悬停油门降至35%,散热改善
```
### 🎮 **控制系统架构**
```mermaid
graph TD
A[遥控器信号] --> B[Betaflight飞控]
B --> C[基础飞行控制]
B --> D[舵机PWM控制]
B --> E[LED灯光控制]
C --> F[四旋翼姿态稳定]
D --> G[发射器触发]
E --> H[光感桶释放]
F --> I[精准飞行]
G --> J[网球发射]
```
#### **控制模块详解**
1. **基础飞行控制**
- 沿用学长优化的PID参数
2. **舵机控制(PWM波)**
```c
// Betaflight配置示例
resource PWM 1 A00 // 映射舵机通道
set servo_center = 1500
set servo_rate = 100
```
- 通过遥控器通道映射控制舵机角度
- 调整权重和偏移实现精确控制
3. **智能起飞桶系统**
```markdown
工作原理:
飞机解锁 → LED亮起 → 光感元件触发 → 卡笋收起 → 桶壁下落
设计亮点:
├── **全自动**:飞手只需正常解锁
├── **快速**:整个过程<1秒
└── **可靠**:由于今年的电控干得不行所有不是很可靠
技术实现:
pinio自定义串口功能 + 光敏传感器电路
```
---
## 🏃♂️ 飞行训练与比赛表现
### **训练强度**
```markdown
训练统计:
├── **总训练次数**:1700+次
├── **日均训练**:20-30次(备赛期)
├── **赛道类型**:障碍穿越、精准投掷、快速起降
└── **成功率**:非常高
```
### **比赛现场**
<div align="center">
<img src="/uploads/2026/4/1776237452088-32057983.png"
alt="CADC比赛现场与其他学校设计"
width="70%"
style="border-radius: 8px; border: 2px solid #e0e0e0;">
<br>
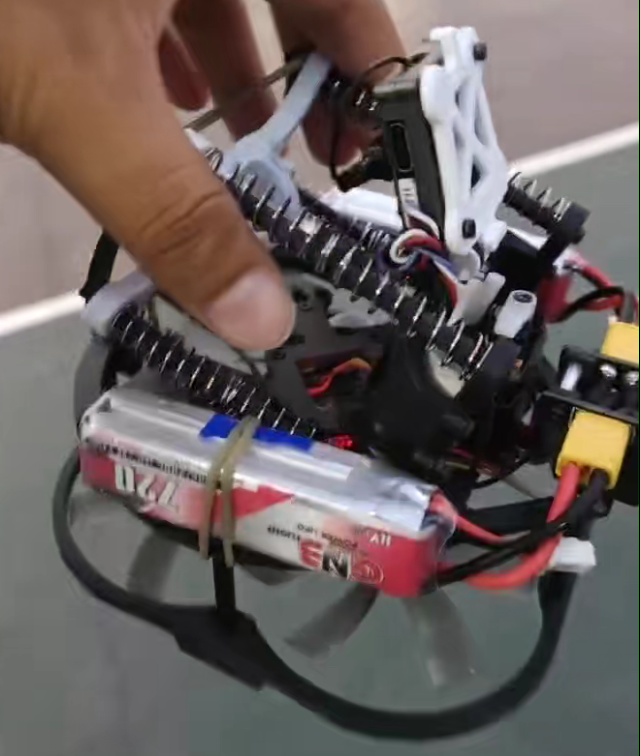
<em>图2:比赛现场观察到的"三明治"式设计(其他学校)</em>
</div>

### **竞技水平分析**
```markdown
飞手能力对比:
├── **我校(我)**:
│ ├── 系统训练1700+次
│ ├── 熟悉飞机每个特性
│ └── 心理素质稳定
│
├── **其他学校普遍**:
│ ├── 训练不足(估计<200次)
│ ├── 对飞机特性了解有限
│ └── 临场紧张失误多
│
└── **结果体现**:
我的单次飞行即完成所有得分项
总耗时:20.9秒(给后续队伍巨大压力)
```
### ⚡ **比赛中的艰难抉择**
```markdown
冲突事件:
CADC决赛第二趟飞行 🆚 理论力学期中考试
决策过程:
├── **机会成本**:放弃可能更好的成绩 vs 放弃更好的学业
├── **团队协商**:与裁判沟通第一个上场
├── **策略调整**:单次飞行追求完美表现
└── **最终选择**:完成一趟后立即赶火车返校
执行结果:
✅ 单趟完成所有得分项(20.9秒)
✅ 为团队奠定领先优势
✅ 准时参加期中考试
✅ 体现优秀的压力管理和时间规划能力
✅ 杨老师开车来接我们直接送到考场门口(
```
---
## 📊 技术对比:两种主流设计方向
| 设计维度 | **我的"叠桨紧凑型"** | **其他学校"三明治型"** |
|----------|---------------------|----------------------|
| **布局理念** | 垂直空间优化 | 水平空间分层 |
| **整机高度** | <100mm | 通常<80mm |
| **穿越性能** | **优**(低矮障碍) | 良(动力不足) |
| **结构复杂度** | 中等(集成度高) | 较低(分层组装) |
| **维护便利性** | 模块化设计 | 需分层拆卸 |
| **动力效率** | 叠桨可能损失部分效率 | 传统布局效率稳定 |
| **创新程度** | 高 | 高 |
---
## 💭 参赛收获与成长
### **技术能力提升**
1. **机械设计**:从模仿到创新,掌握完整设计流程
2. **飞行技能**:发现自身天赋,建立专业自信
3. **系统集成**:跨学科知识融合应用能力
4. **问题解决**:实战中快速定位和解决技术难题
### **软实力发展**
- **团队领导**:带领项目组取得历史最佳成绩
- **压力管理**:平衡比赛与学业的双重压力
- **决策能力**:在有限条件下做出最优选择
- **沟通协调**:与裁判、队友、指导老师有效沟通
### 🎯 **未来展望**
```markdown
短期目标:
├── 优化设计参加下一届CADC
├── 尝试担任模拟搜救组技术指导(已学习PX4和MAVLINK)
└── 将经验整理成技术文档传承
```
---




### **致谢**
感谢实验室全体成员、指导老师、赛事组委会,以及那个在理论和实践之间努力平衡的自己。
---
<div align="center" style="margin-top: 40px; padding: 20px; background: linear-gradient(135deg, #667eea 0%, #764ba2 100%); color: white; border-radius: 15px;">
<h3>🚀 从图纸到蓝天,从理论到奖台</h3>
<p>每一次起飞都是对工程极限的挑战,</p>
<p>每一次降落都是对自我能力的确认。</p>
<p>CADC 2025——这不仅是比赛,更是成长的里程碑。</p>
</div>
---
*记录于 2026年 | 作者:Yare Cosmosky*
*最后更新:2026年4月15日*
---
---
一些图片:


















---
---
##原稿:
---
中国国际飞行器设计挑战赛(China Aeromodelling Design Challenge,简称CADC)是由国家体育总局航空无线电模型运动管理中心、中国航空运动协会、中国大学生体育协会、中国人民解放军国防科技大学联合主办的航空航天科研类赛事。该赛事面向全国高校和高中学生,涵盖飞行器设计、制造与飞行控制等环节。
---
---
这是我在25年参加过的比赛,这个比赛有很多项目,实验室分为了两个项目组,我作为微折(微型折叠飞行器)的负责人参加了其中一个,另一个组参加的是模拟搜救。
---
我们从3月分刚开学就开始准备,先是学习旧设计和其他学校的方案,再是提出新设计,到4月份我已经有了完整的飞机设计并且打印了出来组装验证了。直到10月份去参加了CADC决赛,这一年CADC没有分站赛。期间还去参加了一下CUADC的精准打击在8月份。
---
对了,我是本组的机械设计兼飞手,我这个时候还不知道我飞得真的很好(,反正后来在设计制作飞机的时候我逐渐成了微折项目组的主力,飞行、机械、甚至小部分电控我都是主力,当然这里的电控不是单片机那部分,是飞控固件调试和开发这部分。
---
介绍的差不多了,讲讲我们取得的奖项吧,我带领微折项目组的两个队伍取得了一个银牌和一个第6名,都是国家一等奖的奖项,团体奖也有一个国一。另一个项目组的两个队伍都获得了国三的奖项。
---
接下来看看我的飞机。
---
---
微折的飞机大部分都是以穿越机为基础,自行设计结构,开发飞控使其能够完成比赛要求的功能。
---
我的飞机设计上是一个4旋翼穿越机,为了适应比赛规则规定的大小要求,并且使其具有相对强劲的动力,使用了叠桨的设计,4s动力,电池为2块2s高压锂电池串联供电,飞控选用了flywoo的goku的AIO,电机是C145,桨叶是乾丰D63-3三页桨,飞行器带球总重约300克,满电悬停油门大约35,对于穿越机来说动力水平只能说说得过去。
---
---
我的设计最突出的部分是发射器和图传座:
---
发射器是用来发射比赛要求的网球的,其自重就有60克左右,而且特别大,所以发射器大部分都是空的,我的发射器采用四组不锈钢弹簧作为储能,大量采用soildworks曲面建模,设计了一种由枪械激发结构为灵感来源的插销释放结构,主要优点是比去年的方案有更快的上膛速度,以及高度更低,在使用叠桨的情况下整机高度依然低于100mm,飞机大小这在此比赛中是巨大的优势,因为便于穿越障碍。
---
还有就是图传座,这部分其实一开始是不得已而为之的,因为一开始图传是打算装在碳板下方AIO飞控旁边,但是当时出现了飞行动力不足,悬停油门超过了40,一度怀疑是碳板下方东西太多把桨叶的进风堵上了,所以要把图传挪个位置,但是飞机相当紧凑,于是想到了现在这种方式:为图传设计了一个活动底座,使其活动是为了能方便上膛。
---
对了,上膛非常方便,这也是我的设计的一个优点,去年的上膛需要在手动拉住推板的同时把两个锁扣扣上,而我的上膛分为两步:1.将插销右移放入卡槽。2.将推板拉到底自动锁止。上膛就完成了。
---
顺便说一下我的飞机控制方面,基本是围绕飞控AIO和betaflight固件开展的。基础的四旋翼飞机控制是固件自有的,这部分我没干什么事,只是为其沿用了去年学长调的PID参数,剩下的就是舵机的控制和灯的控制,至于灯这一部分待会再说。
---
舵机,是用PWM波控制的,在BF固件里,我使用pinio自定义串口为其打开舵机控制并映射遥控器通道,然后在遥控器里调整通道权重和偏移,以此达成控制舵机旋转的角度。
---
灯,是用来控制桶的,桶,是这个比赛要求的:“飞行器必须从一个桶里起飞”。为什么用灯控制桶?我们桶的设计是一个学长想到的:下落桶,桶分为飞机支座和外壁,飞机解锁的同时开灯,桶里的光感元件发出信号控制桶壁卡笋收起,桶壁落下,整个过程只需要飞手解锁飞机并且不到一秒完成。
---
灯的控制是用pinio串口自定义功能实现的,其实没啥好说的。
---
我的飞机设计大概就是这样
---
---
接下来是我作为飞手的部分,其实也没啥好说的,也不过就是赛道练习进行了1700余次。
---
---
然后就是参加比赛和结果了,今年的CADC比赛其实比较简陋,可能是去年比赛相当宏大搞没钱了(
---
但是参赛学校和同学们都还是挺多的,还挺热闹的,参观学习了不少学校的设计,说实话,设计上基本就两个方向,我的这种,还有一个学校的(叫什么名我忘了),我把他们的设计叫做三明治。
---

---
然后就是大家飞手的水平……
---
我是真没想到我是飞得最好的那一个,其他学校的飞手应该都没怎么练过。不多说了。
---
---
最后,这此比赛最特别的一点,就是时间跟我的理论力学期中考试重了啊啊啊!
---
最后放弃了第二趟飞行的机会,这个比赛是可以飞两遍取最好成绩的,我们跟裁判商量了第一个上场,飞完一趟就去赶火车了,我飞的那一趟完成了所有得分项,总时间20.9秒,我想应该是给后续上场的队伍不小的压力吧(