blog
•
2026年4月16日
•
66 次阅读
倾转旋翼飞机新型模式转换控制逻辑
tech
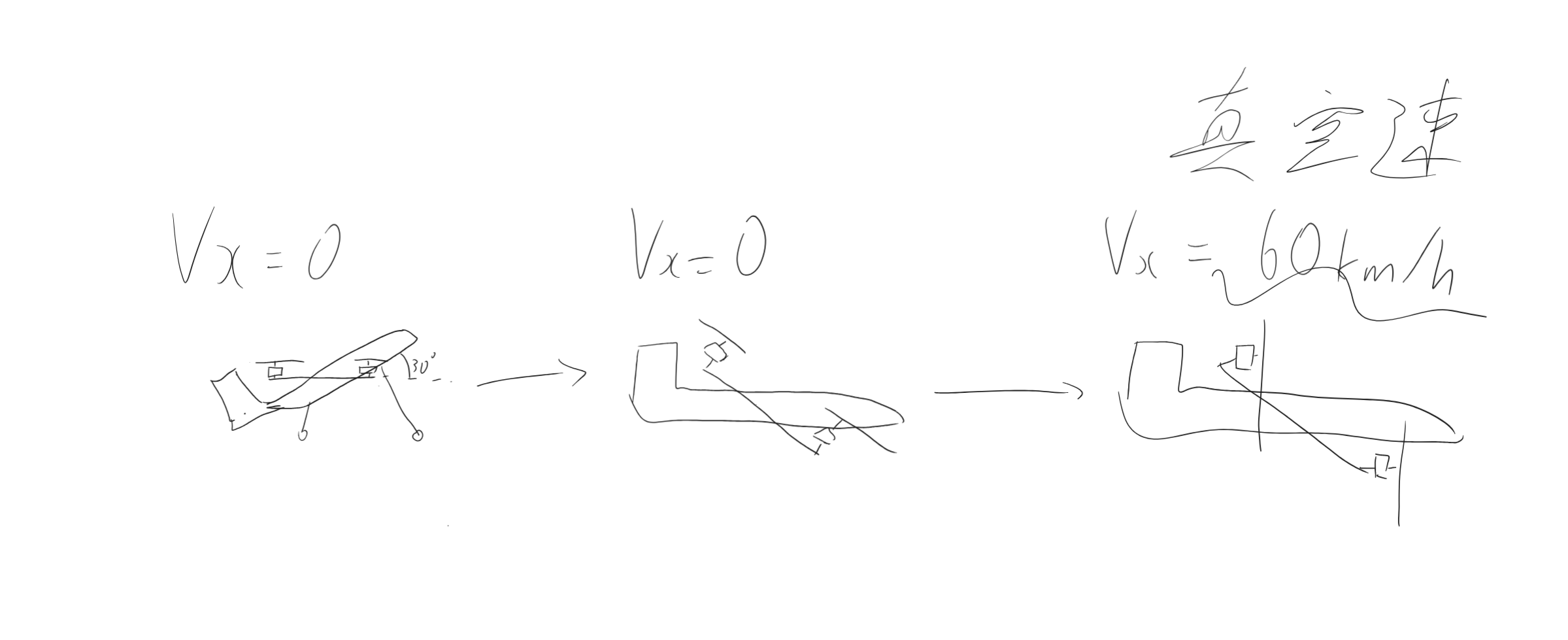
旋翼面与固定翼面呈30°(拟定)夹角前倾,技术上为单模式,效果上为模式热转换
起飞时旋翼面水平,固定翼面上抬。
此方案的核心优点是模式转换可以随时打断,并且连续提供稳定升力,不会出现自由落体的空窗期。
核心逻辑:
旋翼翼面角度舵机根据当前前进速度旋转,实现与前进速度匹配的旋翼角度,多旋翼模式向前飞行时前进速度增加,旋翼面自动根据速度向前倾转,实现多旋翼与固定翼模式无缝转换。
由固定翼转为多旋翼时减小油门并抬头,空速减小,旋翼倾转角度自动渐渐回零实现返回多旋翼模式。
此外还需要减速板,与油门绑定,用于辅助从固定翼模式转换回旋翼。
从速度为30km/h到60km/h为逐渐倾转速度区间(速度视具体机型而定)。
注意事项:
需要设置紧急按钮,用于紧急将旋翼舵机调回旋翼角度。
当然是4个电机一起转动,不然开发难度依旧和传统的一样高。
2026_4_26续:
-
倾转角度控制时会参考飞控的加速度方向,如果飞控加速度计指示飞机向前移动,舵机倾转绝不会回转,以此来避免由于空速计不准或者乱跳空速可能造成的舵机反复跳和失控问题。
对于固定翼机身的舵面控制,利用PX4固件的功能,将舵机直接插在多旋翼固件模式的飞控上,将摇杆映射到舵机上,其实控制舵机逻辑和一般固定翼是一样的。
脚本连接和操控问题,使用树莓派作为机载电脑增加一个树莓派拓展板以获得更多串口,由于多旋翼模式的px4固件不支持空速计,将空速计直接插在树莓派上,由树莓派计算空速并操控4个总线舵机,此外,树莓派还和飞控交换数据,提取飞控加速度计、气压计等数据作为计算空速的参考。也可能额外引入PID实时调参项目(https://github.com/YCwithoutbrain/microLLM_trainer-dronePID)。
机载电脑和飞控的通信使用mavlink协议的参数提取和写入功能。
2026_6_18续:
-
经过多次实验发现重大缺陷,此控制逻辑在模式转换途中,比如旋翼转了10°的时候,旋翼们还是使用的多旋翼的操控逻辑,本来是故意利用这样的设计的,但是忽略了水平分力。
最直观的危害是,中间过程中打杆滚转会使一侧的电机加速,比如右侧电机加速,但是1号电机此时有倾角,加速后比3号电机水平方向的推力大,导致飞机向左偏航自旋。
加上固定翼舵面在低速时无舵效的问题。
初步提出两个改进方法:
1.取消主旋翼参与姿态控制,用小旋翼代替舵面。
2.添加主旋翼刚开始倾转就退出姿态控制只提供推力。即只联动油门,其他不变,这种方法高效但是依赖于本逻辑第一条的“旋翼面与固定翼面呈30°(拟定)夹角前倾”,需要以此逻辑在多旋翼模式下中间过程以前获得足够的空速使固定翼舵面有舵效。